AUTOSAR通讯和诊断
在整个AUTOSAR架构里,我觉得重点在于通讯和诊断服务,因为我认为VFB虚拟总线是AUTOSAR的核心。AUTOSAR通过抽象层,为不同的通讯方式如CAN/LIN/FlexRay/Ethernet等提供了统一的上层接口。目前国内外主流的通讯媒介是CAN,少数ECU的从机使用LIN来通讯。来一张图先看看AUTOSAR的CAN通讯栈。
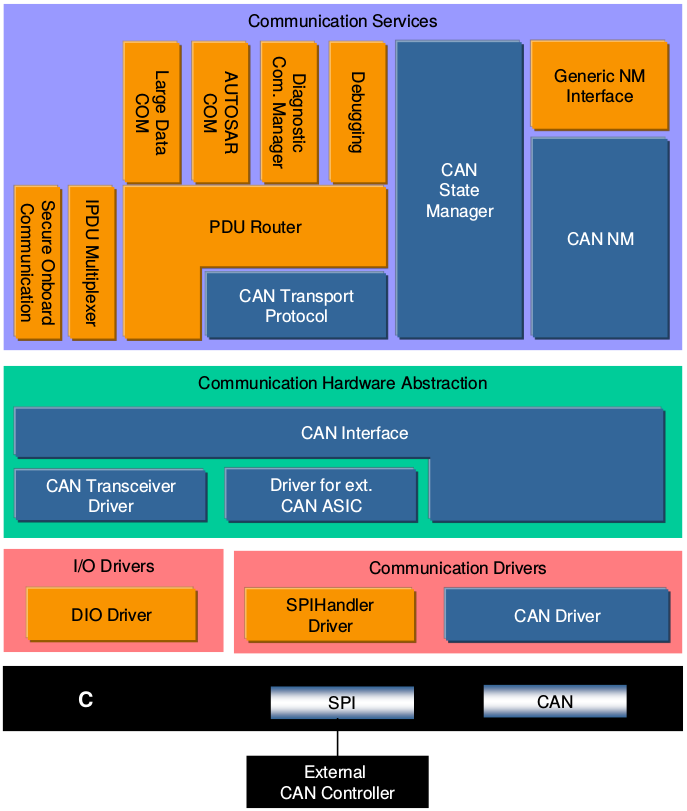
从图上看通讯可划分为3类: 应用报文COM(Application Purpose),诊断报文DCM(Diagnostic Purpose)和 网络管理报文NM(Network Management Purpose)。其中有个什么Large Data COM对我来说是个新东西,还没研究过,看名字估计用作大数据消息的传输,简单看了下文档,也确实如此,但在以前做产品的过程中接触的不是很多,所以对其不做评论。
对于CAN通讯,个人认为还是比较简单的,CAN报文属于明文广播传输,在同一个总线上的任何节点都可以收到其他节点发送来的报文,但是,由于总线上消息可能很多,有些是本节点不需要关心的,所以会采用硬件过滤的方式,只接收那些本节点所关心的报文。对于同一个ID的报文,同一总线上只能有一个节点上发送该报文。另外,每个节点该发送么报文和该接受什么报文,一般由整车厂来定义,并将与零部件节点相关的那部分分发给供应商,当然有些整车场会将所有的报文定义都给你,这份定义文档称作CAN通信矩阵(CAN Matrix),其严格定义了每个ID报文的长度(DLC<=8),一般为8字节,报文里所含消息(signal)的格式和其意义。由于Vector CAN工具的广受欢迎,现在整车厂一般会提供一个Vector DBC格式文件供零部件供应商使用,现在有些零部件供应商已经基本都有一套成熟的工具直接导入该DBC文件直接生成CAN协议栈的配置文件。
在我的个人仓库AS中,就有2个DBC解析和导入工具,一个是AS.xlsm微软办公软件Excel,使用VBA宏解析与导入DBC文件,另一个是利用python实现的一个解析工具ascc,所以有兴趣的人可以基于以上2个工具进行二次开发,开发出和你正在使用的CAN协议栈配置文件生成工具。
这里以一张截图展示下我的工具AS.xlsm,其可以很方便的导入Vector DBC文件,但目前的功能仅限于此,不支持其他生成AUTOSAR COM配置文件的功能,当初太懒了,没做,还有就是实在没有python来的简单快捷,所以放弃了使用EXCEL来生成AUTOSAR BSW配置文件的想法,但这个工具依然保留着以备不时之需。
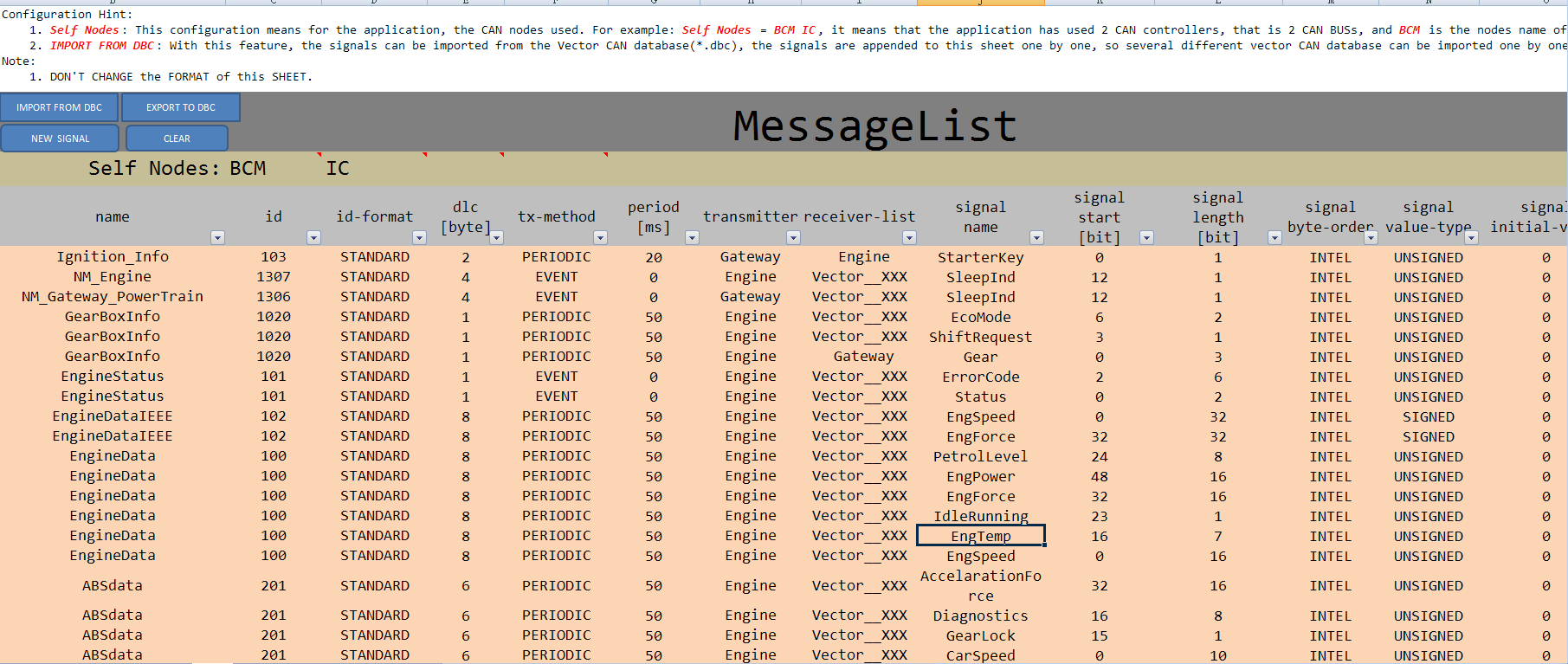
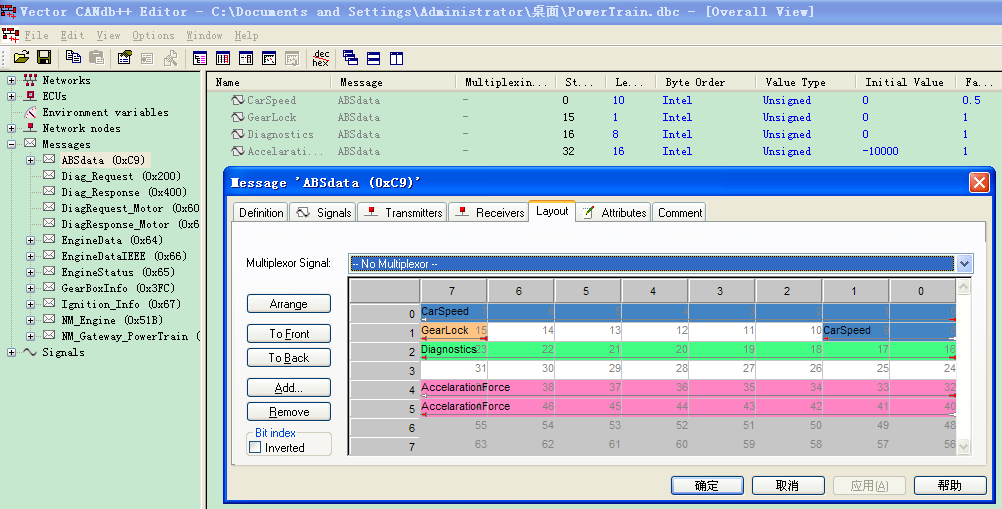
图2为导入Vector CANoe Demmo PowerTrain.dbc之后的样子,每一个CAN报文都有自己的ID,且各不相同,每一个报文可含有多个信号,如ABSData,图3为使用Vector DBC Editor打开该DBC文件后,报文ABSData的一个信号布局图。从而,收到报文ID为201(0xC9)的报文,ECU就知道该报文为ABSData并知道其数据场的前12位表征信号车速(CarSpeed),第15位表征信号齿轮锁(GearLock)等。好吧,也就是说,对于AUTOSAR的COM(Application Purpose),其是根据整车厂提供的CAN通讯矩阵高度定制的,对同一总线上每个ECU来说其COM模块的配置文件是不一样的。
说到这里就简单说下,常用的CAN控制器是个什么样子的。一般来说,主流的CAN控制器会有N个接受报文箱(RX MESSAGE BOX)和M个发送报文箱(TX MESSAGE BOX),一般而言,在做CAN的配置时,会按照CAN ID由小到大的顺序来依次配置RX MESSAGE BOX,设置每个RX MESSAGE BOX的过滤器(filter)让其只接收特定CAN ID的报文,如上图2所示,可以配置第1个RX MESSAGE BOX只接收报文Ignition_Info,可配置第2个RX MESSAGE BOX接收ID范围为0x500至0x5FF的NM网络管理报文(一般而言,NM网路管理报文为一个连续地址范围),可以配置第3个RX MESSAGE BOX只接收报文GearBoxInfo,以此类推。一般而言COM和DCM报文对应一个唯一的RX MESSAGE BOX,只有在报文太多的情况下,会酌情考虑将ID相近的报文使用同一个RX MESSAGE BOX来接受。对于发送报文,与接受相似,但是,一般而言M要小于N很多,所以一般情况下会将所有TX MESSAGE BOX链接在一起使用。当然还有一些CAN控制器的的MESSAGE BOX即可用作接收也可用作发送,但配置方法基本和前述一样。
至此,简单介绍了AUTOSAR的CAN应用报文COM,下面再来介绍网络管理NM。第一次接触CAN网络管理NM这个名词时,我认为其作用应该是网络状态监听和网络负载管理,但实际却不是这样(个人观点),从某种意义上讲,我甚至认为网络管理报文可有可无,没有什么特别大的作用,以我过去在VISTEON的经验,网络管理报文的主要作用是用来同步同一CAN总线上各节点的状态,使各节点能够做到同时唤醒,并在各节点都睡眠条件满足的情况下同时休眠。所以,OSEK NM对此提出了2种网络管理方式:直接网络管理和间接网络管理。AUTOSAR NM则认为属于直接网络管理。
以我个人经验,直接网络管理报文即有专门的CAN报文用来同步各节点状态,而间接网路管理报文则没有专门的CAN报文从而间接地使用各节点的某个应用报文(或某个应用报文的某个消息)来同步各节点状态,根据OSEK NM文档的描述,一般建议在CAN网络负载较高的情况下,为减轻网络负载,使用这种方式。由于第2种间接网络管理高度定制,所以没有什么大的共性,所以就直接不讲了,还有就是没经验,我也不是很懂啊。
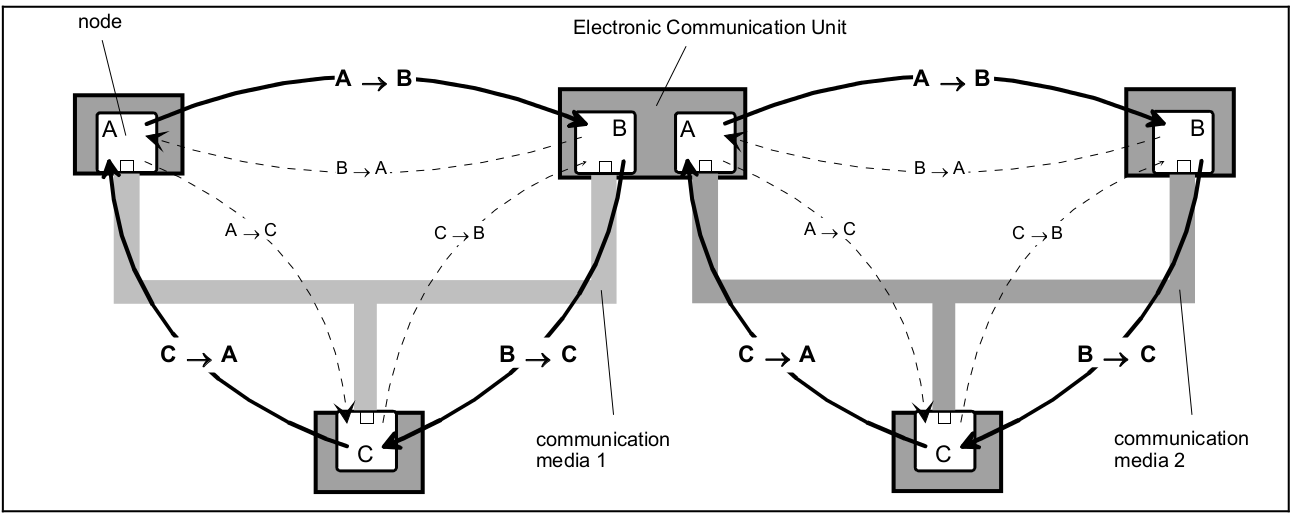
所以就简单介绍下OSEK DIRECT NM和AUTOSAR CAN NM吧,不过说实话,他们的文档讲的真的太详细了,看看就懂了。如图3所示,每个节点会有一个专有的网络管理报文,比如说A节点ID为1(其对应网络管理报文CAN ID为0x501),B节点ID为2(其对应网络管理报文CAN ID为0x502),C节点ID为3(其对应网络管理报文CAN ID为0x503),呵呵,一般来说,同一总线上网络管理报文为同一连续网段,如从0x500到0x5FF,则可支持256网络节点,不过一般不会有那么多,顶多10(国内)多个吧。根据OSEK NM定义,NM报文总是从小ID节点发往较大ID节点,至最大节点ID重新发往最小ID节点。这就好像一个班的学生去上足球课,所有学生七嘴八舌向老师喊报道后(Alive Message),老师让他们按身高由高到低围成一个圈,然后由个最矮的那个将球踢给第2矮的人,然后第2矮的人将球踢给比他高一点的人直到最高个,由最高个在踢给最小个,并且老师说了踢球间隔控制在2s以内,并且要准(不要跟我讲有人身高一样,这里就假设都不一样),这个就是正常情况下的Ring Message。这个时候,一个磨磨唧唧总迟到的人来了,像老师喊了生报道(Alive Message),请求加入队伍,老师批准了,然后该人迅速找准位置,加入圆圈,开始正常的传球(Ring Message)。然后老师又说当大家都喊累了的时候停止传球,解散休息,当有任何一个人喊不累,即使其他人都喊累,也得都给我继续。所以当大家累了之后,一个接着一个开始喊累了要休息(Ring Message with Sleep Indication)时,球得继续踢,直到最后一个说我也累了大家解散休息吧(Ring Message with Sleep Acknoledge),这时大家就可以解散了(注意,老师规定只能在你传球的时候喊出累或者不累,不发声就是不累)。当然和OSEK NM机制会有些差别,不过规则基本很像上述足球课的例子,关于limphome什么的,大家自己看文档去脑补吧。
关于AUTOSAR CAN NM,读其文档,我是感觉要比OSEK NM简单,并且其号称其总线负载更低,个人只认为在总线唤醒的那一刻,AUTOSAR NM比OSEK NM的总线负载率要低,因为AUTOSAR CAN NM不需要喊报道,没有Alive Message。AUTOSAR CAN NM只有周期性消息,只要该节点不想休眠,其就可以周期性的发送网络管理报文,为了降低负载,AUTOSAR NM使用一种特殊的方式来达到此目的,即每个节点的有一个小周期(reduced period)和一个正常周期(normal period),小周期每个节点不相同,但正常周期所有节点一样,并且小周期一定要小于正常周期。
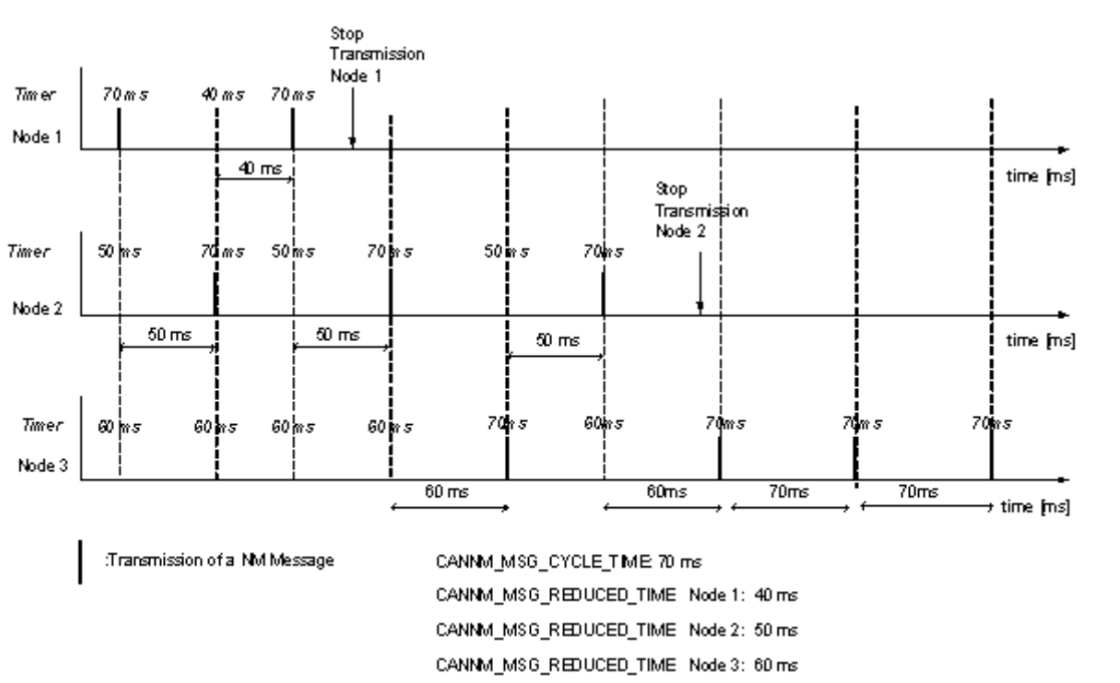
如图4所示,节点正常周期为70ms,节点1小周期为40ms,节点2小周期为50ms,节点3小周期为60ms。根据AUTOSAR CAN NM的规则,节点发送网络管理报文后,下一次发送网络管理报文的时间为正常周期结束之后;节点收到其他节点发送的报文后,节点需将下一次发送网络管理报文的时间设置为小周期结束之后。则如图4所示节点1发送网路管理报文,则节点1在70ms后才会第2次发送网络管理报文,由于收到报文,节点2将在50ms之后发送报文,节点3将在60ms后发送报文。所以当然节点2在50ms超时后率先发送出报文,这时节点2将在70ms后才会发送报文,由于收到报文,节点1将在40ms之后发送报文,节点3将在60ms后发送报文。所以当然节点1在40ms超时后再次发送出报文。从而如果节点1/2/3都不休眠,则总线上将始终是节点1和节点2分别以40ms和50ms的周期发送网络管理报文,而节点3因为小周期太大将没有机会发送网络管理报文。所以说AUTOSAR CAN NM只有小周期最小的那两个节点有机会发送网络管理报文,其他节点只能默默监听这网络状态。所以可能有人会问,我了个去,那我怎么知道那个节点还在不在呢,那我只能告诉你,监听他的周期性应用报文吧。
接着就剩下诊断报文了,说到此,虽然诊断很简单,但是两个标准协议必须了解,iso15765(CAN传输协议)和iso14229(统一诊断服务)。其中,iso15765定义描述了通过CAN报文如何传输多余8字节(但小于等于4095字节)的数据。这个就不想介绍了,看看wiki的介绍基本就能明白是什么意思,还是相当简单的。虽然数据长度可以大于8个字节,一条服务请求是通过多包传输的,但其总的数据格式是预定义的。想简单了解UDS诊断服务,可参见后续我的bootloader的介绍文档。
