AUTOSAR TCPIP
okay, first of all, we should know the basic frame format of an Ethernet Frame, the PDF file from baidu do introuduce it very clearly. And as it was complex, it was not possible for me to implement it, so I found out the ARCCORE 4.2 implementation of TCPIP stack based on LWIP.
As I think that all type of devices which has the attribute that exchange data with a fixed format as the same as CAN can be easily simulated for the purpose to study the protocol based on that device, so I integrated the code I got from PWC-Demonstrator repositioy into ascore which can be simulated running on host machine Ubuntu, and now it was done, and it works good. The below picture shows how it works.
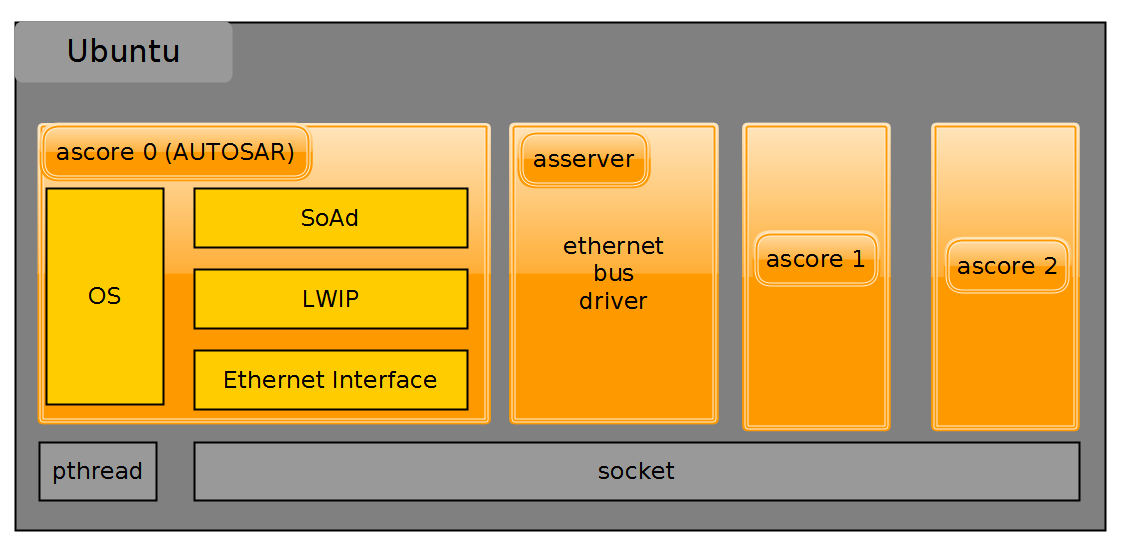
So as the picture shows above, the ascore and asserver are applications on host machine ubuntu, the ascore OS is based on posix thread(yes, it was toppers_osek that I ported it running on posix thread as the same strategy that FreeRTOS does). For the ethernet device, I simulated it on socket(I have also simulated a CAN device on socket, and it works good,too).
By this kind of simulation of device strategy, I can focus on the study of the protocal things, get rid of the bing up hardware devices, it really saves me a lot of precious time.
Back to the picture above, the asserver is a socket server that will receive the Ethernet Frame from the instance client of ascore 0/1/2(in fact, the number of instance ascore is not limited, it is up to the performance of host machine Ubuntu), and then forward the received frame to other instance client of ascore, so that a network is build, and the ascore 0/1/2 each will be a node.
So further on, I need to research the LWIP stack and implemenet different ascore applications so that they can communicate with each other.
